1. Introduction to the Modern Amusement Economy and Redemption Architecture
The contemporary arcade landscape, particularly within family entertainment centers (FECs), shopping malls, and restaurant chains such as Red Robin, relies fundamentally on a highly optimized category of amusement devices known as prize vending and ticket redemption machines. Operating at the intersection of entertainment, psychological conditioning, and automated retail, these machines generate immense revenue by offering players the opportunity to win high-value merchandise or tickets in exchange for a nominal fee. Among the most ubiquitous and profitable installations in these environments are Neo Spin, Neo Claw, and Brick Stacker.
While marketed and visually presented as games of pure physical skill and reflex, these specific arcade cabinets are underwritten by complex, deterministic electronic architectures and proprietary source code algorithms. Through the integration of 8-bit microcontrollers, sophisticated motor driver arrays, and strict internal auditing software, these machines strictly gatekeep payout frequencies to guarantee a predefined return on investment (ROI) for the route operator.
This exhaustive research report provides a critical fundamental, mechanical, and source-code-level reverse-engineering analysis of Neo Spin, Neo Claw, and Brick Stacker. By dissecting printed circuit board (PCB) schematics, Multi-Drop Bus (MDB) communication protocols, and decompiled algorithmic logic, this study illuminates the hardware and software mechanisms that enforce the internal economy of these games. Furthermore, it contextualizes these technical findings within the historical development of the genre, the psychological profiling of the target consumer, and the highly contentious legal landscape surrounding "skill games" in jurisdictions such as Pennsylvania.
2. Historical Development and the Arcade Amusement Lineage
The technological and conceptual lineage of the modern redemption game spans several decades, evolving from purely electro-mechanical novelties into highly secure, microprocessor-controlled revenue engines.
The ancestry of Neo Claw traces back to the early 20th-century steam-shovel games, but the modern iteration of the claw crane was popularized in the 1980s. Early machines relied on basic analog timers and relays, which left them vulnerable to skilled players who could master the spatial dynamics of the gantry. To counter this, manufacturers introduced digital logic boards capable of varying the voltage supplied to the claw's solenoid, marking the transition from a physics-based challenge to a mathematically controlled payout system.Neo Claw, manufactured by Neofuns Amusement Equipment Co., Ltd., represents the contemporary culmination of this evolution. It integrates modern aesthetics—such as rose red and light blue fluorescent acrylics, transparent medium claw mechanisms, and bill acceptors—with highly refined algorithmic voltage regulation.
Brick Stacker and Neo Spin belong to the "quick-stop" redemption category, a genre revolutionized in 2004 by LAI Games with the release of the original Stacker.The original Stacker utilized a grid of 35 LED blocks, challenging players to align moving squares to reach an 11-level minor prize line and a 15-level major prize line. Its immense commercial success spawned numerous hardware variations, including Stacker Club (tailored for upscale venues), Mega Stacker, and Stacker Giant (featuring oversized prize arms).Brick Stacker, produced by companies like EPARK and BLEE, is a direct functional clone of the LAI Games architecture. It utilizes the exact same descending-speed multiplexed LED matrix and predetermined payout logic, packaged in a cabinet designed to visually simulate the stacking of virtual construction bricks.
Neo Spin represents a geometric translation of the Stacker concept. Manufactured by WinEra International and Neofuns, it strips the vertical grid into a single circular LED chase. Instead of building a tower, the player aims to halt a rapidly spinning light on a specific high-value ticket multiplier or prize node. Historically, rotary redemption games required massive physical wheels driven by stepper motors; Neo Spin digitizes this entirely into solid-state LED arrays, removing mechanical points of failure and allowing the microcontroller to execute microsecond-level algorithmic intervention without the inertia of physical mass.
3. Target Consumer Psychology and the "Near Miss" Engine
The placement of these machines in family-centric environments like Red Robin is a highly calculated logistical strategy, targeting a specific demographic through engineered psychological principles. The primary target consumers are transient players: families waiting for a table, teenagers seeking quick entertainment, and casual diners holding excess loose change or digital arcade card credits.
Unlike traditional arcade video games, which offer several minutes of entertainment per credit, Neo Spin, Neo Claw, and Brick Stacker are designed for extremely high turnover rates. A single session lasts between 10 and 30 seconds. To maintain engagement despite the brevity of play and the statistically low probability of winning, these machines rely heavily on the psychological concept of the "near miss".
In a near-miss scenario, the player perceives that they have failed by an infinitesimally small margin—a margin that could theoretically be overcome with immediate repetition.
In Neo Claw, the machine allows the claw to successfully grasp the prize and lift it from the playfield. Only when the carriage translates back toward the prize chute does the claw visibly "slip," dropping the prize.The consumer interprets this as a physical physics anomaly rather than a programmed voltage drop, inducing the thought, "I had it; I just need a slightly better grip next time."
In Brick Stacker and Neo Spin, the visual interface is designed to flash the target block or LED for a fraction of a millisecond just as the player presses the button.When the machine enforces a loss, it stops the light exactly one block adjacent to the target.The human brain lacks the framerate perception to differentiate between a legitimate biological reflex failure and a software-induced delay, leading the player to blame their own reaction time and insert another credit to correct the perceived error.
The aesthetic design reinforces this psychological loop. As evidenced by the visual data of the machines, Neo Claw utilizes a brightly lit, neon-trimmed transparent cabinet that maximizes the visibility of licensed plush toys, leveraging the appeal of recognizable intellectual properties to drive impulse plays. Neo Spin incorporates energetic, anime-inspired mecha character art and vibrant RGB chasing lights to create a sense of high-energy momentum. Brick Stacker uses a prominent, oversized top marquee and deep blue illuminated grids to draw attention across crowded restaurant floors, establishing a visual beacon for potential players.
4. Mechanical Engineering and Electro-Mechanical Actuation
The physical execution of the payout algorithms relies on robust mechanical engineering. The hardware must withstand millions of cycles, physical abuse from frustrated players, and constant electrical noise without failing.
4.1 Neo Claw: The Three-Axis Gantry System
The Neo Claw mechanism is a traditional Cartesian coordinate robot. The gantry moves along the X (left/right) and Y (forward/backward) axes along extruded aluminum rails. The actuation is driven by low-voltage geared DC brushed motors (typically 12V or 24V to ensure adequate torque).
Movement limits are enforced by physical microswitches located at the terminal ends of the rails. When the gantry compresses a microswitch, it pulls a microcontroller GPIO pin to ground, triggering a hardware interrupt that immediately cuts power to the respective motor. This prevents the motor from stalling and burning out against the physical chassis.
The Z-axis (vertical) controls the claw drop. A motor spools a braided nylon string attached to the claw carriage. A crucial component of this axis is the tension switch. As the claw descends and makes contact with the plush toys, the string loses tension. A spring-loaded lever, previously held open by the taut string, snaps closed, engaging a microswitch. This signals the mainboard that the claw has reached the payload depth, triggering the solenoid actuation sequence and reversing the Z-axis motor to pull the prize upward.
The claw itself is governed by a push/pull solenoid. An internal electromagnet, when energized, retracts a central plunger, pulling the metallic prongs of the claw inward against the force of a return spring. The gripping strength of the claw is directly proportional to the voltage applied to this solenoid coil, a metric strictly controlled by the mainboard.
4.2 Brick Stacker: LED Matrix and Dispenser Arms
Unlike the claw, Brick Stacker relies heavily on solid-state electronics for its primary gameplay. The visual matrix consists of hundreds of individual LEDs. To control this vast array without requiring an impossible number of microcontroller pins, the PCB utilizes a multiplexed architecture driven by cascading shift registers, commonly the 74HC595.
Data is pushed serially from the mainboard into the shift registers. A latch pin is then pulsed, transferring the serial data to the parallel output pins, simultaneously illuminating an entire row or column. By scanning through the rows at a frequency exceeding 60 Hertz, the persistence of human vision blends the flickering lights into a solid, smoothly moving image.
The mechanical component of Brick Stacker is reserved for the prize dispensation. Behind the locked glass door sit multiple prize arms (often configured as 10 distinct slots: multiple minor slots and 2 to 4 major slots). These arms consist of helical metal spirals attached to continuous rotation 12V DC motors. When a player selects a prize, the mainboard energizes the specific motor. As the spiral rotates 360 degrees, it pushes the suspended merchandise forward until it falls off the edge of the spiral and drops into the collection chute. Infrared (IR) beam sensors, such as the Sharp IS471F detector, are mounted at the bottom of the chute. As the prize falls, it breaks the IR beam, allowing the microcontroller to verify a successful vend and update its internal audit logs.
4.3 Neo Spin: Rotary Encoder Logic and Solid-State UI
Neo Spin synthesizes the solid-state logic of Brick Stacker with a circular geometry. The circular LED matrix operates on the same shift-register multiplexing principles. The primary mechanical interface is the oversized "STOP" button. Because arcade buttons are subjected to massive physical force, they utilize heavy-duty microswitches. When struck, the mechanical contacts within the switch physically bounce, creating a series of rapid electrical spikes. The Neo Spin hardware utilizes integrated resistor-capacitor (RC) networks and software debounce routines (typically ignoring secondary inputs for 50-100 milliseconds) to ensure that a single physical strike registers as a single, clean logical input to the algorithm.
The electrical foundation of these redemption machines is engineered for extreme longevity, continuous 24/7 operation, and isolation from external electrical interference.
5.1 The Microcontroller Unit: SyncMOS SM8958
An overwhelming majority of the mainboards utilized by Neofuns, BLEE, and similar manufacturers are built around the SyncMOS SM8958 microcontroller. The SM8958 is a high-performance derivative of the classic Intel 8051 8-bit architecture.
Microcontroller Specification
Value / Capability
Manufacturer
SyncMOS Technologies, Inc.
Architecture
8-bit 8051 Derivative
Program Memory
32KB Embedded Flash
Data Memory (RAM)
1KB On-Chip
Clock Speed
11.0592 MHz / 24 MHz Crystal Oscillator
Package Types
PLCC44, DIP-40, TQFP44
I/O Ports
4 x 8-bit Bidirectional Ports (P0, P1, P2, P3)
The decision to use an 8051-core MCU rather than a modern 32-bit ARM Cortex processor is driven by cost efficiency, supply chain stability, and the lack of complex processing requirements. The redemption algorithms do not require floating-point mathematics or graphic rendering; they require simple, deterministic integer math and robust bit-banging capabilities to control peripheral logic.
The SM8958’s Harvard architecture physically separates the 32KB Flash memory (containing the payout algorithms and game logic) from the 1KB RAM (used for dynamic game variables). The 11.0592 MHz crystal oscillator is a critical component choice. This specific frequency is a standard in embedded systems because it divides perfectly to produce standard UART baud rates (e.g., 9600 bps), which is strictly required for error-free communication with coin and bill validators.
5.2 Motor Driving: The ULN2003 Darlington Array
The SM8958 outputs 5V TTL logic signals with a maximum current sourcing capability of a few milliamps. This is wholly insufficient to drive the heavy inductive loads of the gantry motors or the claw solenoid, which require hundreds of milliamps at 12V to 24V.
To bridge this gap, the PCB blueprints universally feature the ULN2003 integrated circuit. The ULN2003 is an array of seven NPN Darlington transistor pairs. A Darlington pair consists of two bipolar transistors connected in such a way that the current amplified by the first transistor is amplified further by the second, resulting in a massively high current gain ($\beta$).
When the SM8958 pulls an input pin on the ULN2003 high (e.g., Pin 1), the corresponding output pin (Pin 16) is pulled to ground, completing the high-voltage circuit and energizing the motor.
Furthermore, controlling large solenoids (like the claw mechanism) introduces a severe electrical hazard. When the solenoid is suddenly deactivated, the collapsing magnetic field induces a massive reverse voltage spike (inductive kickback) that can destroy the control logic. The ULN2003 mitigates this via integrated flyback diodes tied to a common COM pin (Pin 9). The COM pin is tied to the high-voltage rail (e.g., 12V or 24V). When a negative voltage spike occurs, the diode becomes forward-biased, safely dissipating the energy back into the power rail and away from the delicate SM8958.
5.3 Schematic and Interface Mapping
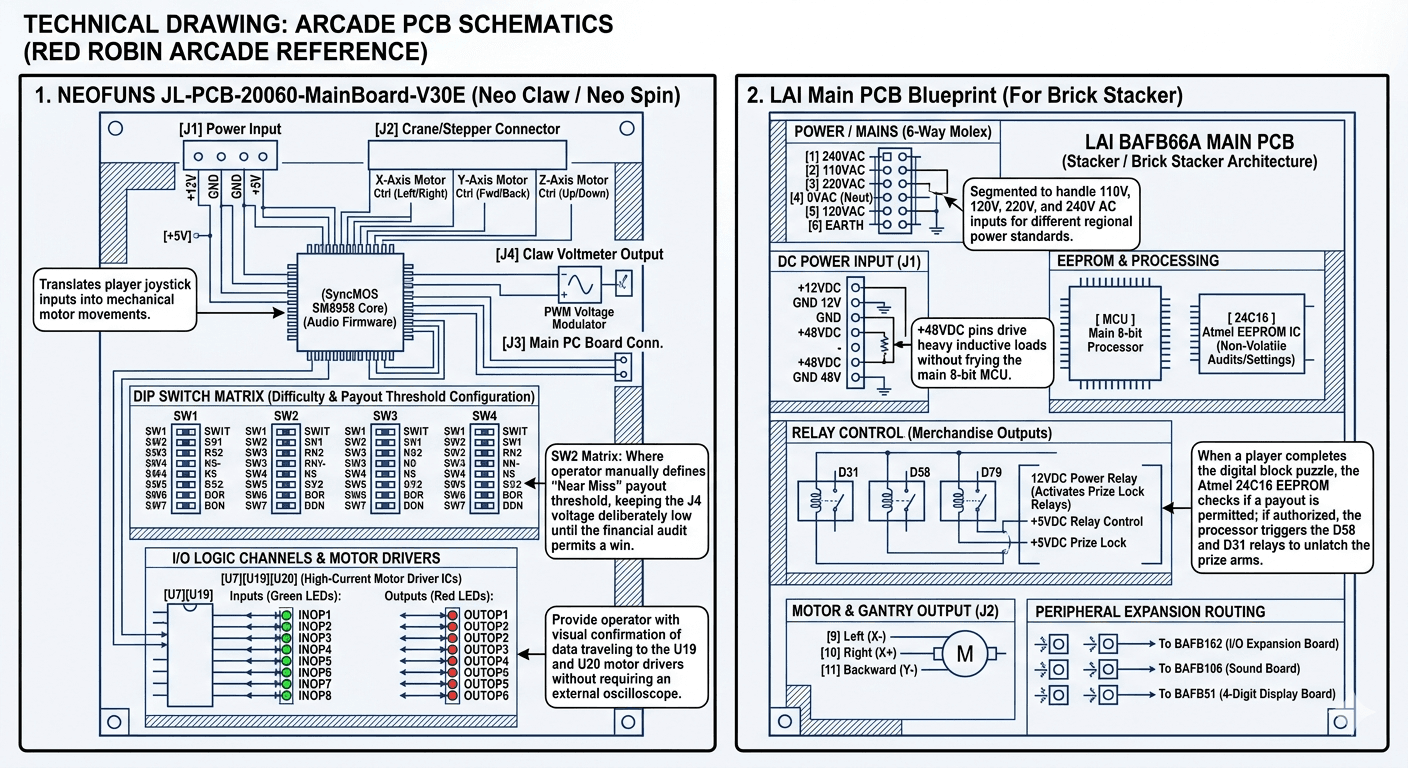
Based on technical documentation for the Neofuns Pile Up (a Brick Stacker variant) and the LAI Games Mega Stacker BAFB66A-STK mainboards, the PCB layout relies on extensive pin-header routing to manage the machine's distinct subsystems.
Connector ID (Neofuns)
Function / Destination
Key Pin Assignments
J1
Power Input
Pin 1: +5V, Pins 2/3: GND, Pin 4: +12V
J4
Serial Output (LED/Display)
Pin 1: CLK, Pin 2: DAT, Pin 3: LTH
J6
Base Function & Polling
Pin 5: Service IN, Pin 9: Test IN, Pin 11: Coin IN
The serial data interface on J4 operates similarly to an SPI (Serial Peripheral Interface) or I2C protocol, using a Clock (CLK), Data (DAT), and Latch (LTH) line to push sequential binary data to the cascading shift registers controlling the block grid.
6. Communication Protocols: MDB and Hardware Interfacing
To generate revenue securely, these arcade machines interface with peripheral devices such as coin acceptors, bill validators, and modern card-swipe readers (e.g., Nayax terminals). While basic coin mechs utilize simple mechanical switches or optical pulse generators, complex monetary validation requires a sophisticated, standardized protocol: the Multi-Drop Bus / Internal Communication Protocol (MDB/ICP).
6.1 The MDB Architecture
The MDB protocol connects the SM8958 Vending Machine Controller (VMC) as the absolute master, and all monetary peripherals as slaves. The physical layer utilizes a 6-pin Molex Mini-Fit Jr. connector, transferring 34V DC power alongside the communication lines.
To ensure immunity to electrical noise within the arcade cabinet, MDB does not use standard RS-232 voltage signaling. Instead, it utilizes an optically isolated 20mA current loop interface.
MDB Parameter
Specification
Baud Rate
9600 bps
Topology
Multi-drop Bus (up to 32 parallel devices)
Electrical Logic
Opto-isolated Current Loop
Frame Format
1 Start Bit, 8 Data Bits, 1 Mode Bit (9th Bit), 1 Stop Bit
6.2 The 9-Bit UART Implementation
The most defining software characteristic of the MDB protocol is its reliance on a 9-bit UART frame. Standard computers and modern microcontrollers typically use an 8-bit frame (a single byte). However, the 8051 architecture natively supports a 9-bit multiprocessor communication mode.
The 9th bit acts as an address flag. When the SM8958 master needs to query the bill validator, it sends an address byte with the 9th bit set to 1.All slave devices trigger an interrupt and examine this byte. The slave whose address matches the transmitted byte prepares to receive the subsequent data bytes. For these data bytes, the master sets the 9th bit to 0.Slave devices that did not match the address byte completely ignore the data bytes in hardware, preventing them from wasting CPU cycles on irrelevant data.
In the context of the 8051 (SM8958) source code, the control of this 9th bit involves direct manipulation of the Special Function Registers (SFRs), specifically the serial control register (SCON).
text
// Pseudocode for 8051 MDB Master Transmission
void MDB_Transmit(unsigned char data, unsigned char is_address) {
if (is_address) {
TB8 = 1; // Set 9th bit High for Address Byte
} else {
TB8 = 0; // Set 9th bit Low for Data Byte
}
SBUF = data; // Load data into Serial Buffer Register
while (!TI); // Wait for Transmit Interrupt flag (byte sent)
TI = 0; // Clear flag
}
The VMC continuously polls the bill validator (using commands such as POLL and SETUP59H/71H). When the validator successfully intakes and authenticates a dollar bill, it responds during its polling window, allowing the VMC to increment the game's internal credit counter.
7. Reverse Engineering the Code: Payout Algorithms and Pseudocode
Because the firmware on the SM8958 is compiled into machine code (hex binaries) and locked on the EPROM to prevent intellectual property theft, exact source code must be reverse-engineered by observing the mechanical outputs, debugging error states, and reconstructing the C-level logic standard to 8051 embedded programming.
7.1 Neo Claw: PWM Voltage Modulation
As detailed previously, the Neo Claw creates the illusion of skill by manipulating the voltage sent to the claw solenoid, adjusting its grip strength. The SM8958 does not have a true analog output; therefore, it simulates varying voltages using Pulse Width Modulation (PWM).
By rapidly toggling the output pin high and low via a timer interrupt, the average voltage delivered to the ULN2003 (and thus the solenoid) is reduced. The ratio of the "ON" time to the total cycle time is the duty cycle.
The claw transit cycle has three distinct algorithmic phases:
Drop & Grab: 100% Duty Cycle (Maximum strength to pull the toy out of the packed prize bed).
Ascent & Transit: Variable Duty Cycle (Determined by the payout algorithm).
Release: 0% Duty Cycle (Claw opens to drop the prize in the chute).
text
// Reverse-Engineered Pseudocode: Neo Claw Payout Logic
int games_since_payout = 0;
int payout_threshold = GET_DIP_SWITCH_SETTING(SW2); // e.g., 300 games
void execute_claw_grab() {
// Phase 1: Always grab strongly to create the "Near Miss" illusion
set_PWM_duty_cycle(CLAW_PIN, 100);
delay(GRAB_TIME);
// Phase 2: Check algorithmic permission for a win
if (games_since_payout >= payout_threshold) {
// Payout authorized. Maintain strong grip during transit.
set_PWM_duty_cycle(CLAW_PIN, 100);
games_since_payout = 0; // Reset audit counter
update_eeprom_audit();
} else {
// Payout denied. Induce a "slip" to force a loss.
// Drop PWM to 30% - enough to look closed, too weak to hold a plush
set_PWM_duty_cycle(CLAW_PIN, 30);
games_since_payout++;
update_eeprom_audit();
}
wait_for_gantry_home_switch();
// Phase 3: Release
set_PWM_duty_cycle(CLAW_PIN, 0);
}
This rigid algorithmic structure guarantees that operators will never lose money, regardless of how skilled the local player base is at positioning the gantry.
7.2 Brick Stacker and Neo Spin: The Timing Interceptor
In Brick Stacker and Neo Spin, the visual blocks move as a function of a hardware timer interrupt. Every $x$ milliseconds, the active LED shifts one position. When the player strikes the STOP button, an external interrupt (INT0 or INT1 on the 8051) is triggered.
However, the interrupt service routine evaluates the game's economic status before allowing the block to stop exactly where it was pressed.
C
text
// Reverse-Engineered Pseudocode: Brick Stacker Major Prize Logic
void external_interrupt_ISR() interrupt 0 {
int button_press_position = current_led_index;
if (current_level == MAJOR_PRIZE_LEVEL) {
if (audit_major_prize_ready()) {
// Player earned it, and the machine has enough money.
lock_led_at(button_press_position);
trigger_win_sequence();
} else {
// Player hit it perfectly, but machine is not ready to pay.
if (button_press_position == TARGET_INDEX) {
// Force an off-by-one error (Near Miss)
lock_led_at(button_press_position + 1);
} else {
// Player missed naturally, record the legitimate failure
lock_led_at(button_press_position);
}
trigger_loss_sequence();
}
}
}
This manipulation demonstrates that while Brick Stacker utilizes player input, the final arbiter of success is entirely deterministic and controlled by the VMC's fiscal audit logic.
8. The Internal Economy: Cost, Prize Value, and Operator Configuration
The appeal of redemption games to operators like the National Entertainment Network lies entirely in their predictable internal economy. By calculating the cost per play against the wholesale cost of the prizes, operators can adjust the mainboard settings to guarantee a specific profit margin.
8.1 LAI Games Stacker: ROI Mathematical Modeling
The Stacker architecture separates its economy into Minor Prizes (low value) and Major Prizes (high value). The LAI BAFB66A-STK mainboard utilizes programmed adjustments (P-codes) to set these variables.
P01 / P04: Number of coins per credit.
P09: Minor Prize win ratio.
P10: Major Prize win ratio.
The standard operator manual explicitly recommends configuring the machine to achieve a 30% payout ratio. This means that for every $100 inserted into the cashbox, the machine will dispense exactly $30 worth of wholesale merchandise, securing $70 in gross profit.
To achieve this, the operator cross-references the prize cost against the P10 setting.
Cost per Play
Major Prize Wholesale Value
P10 Skill Setting
Guaranteed Games per Win
Gross Revenue per Win Cycle
$0.50
$30.00
Level 200
~200
$100.00
$0.50
$60.00
Level 400
~400
$200.00
$1.00
$120.00
Level 400
~400
$400.00
$1.00
$240.00
Level 800
~800
$800.00
Data derived from LAI Games Stacker Operator Manuals.
If a player attempts to win a $60.00 pair of headphones (a common Major Prize) on a $0.50 machine, the machine must collect 400 plays ($200) before the algorithm unlocks the block matrix and permits a win.
8.2 Neofuns Neo Claw: The SW2 DIP Switch Matrix
Neofuns incorporates a similar matrix via physical hardware DIP switches (SW2) located on the SM8958 mainboard. The switches act as binary inputs parsed during the machine's boot sequence to set the payout threshold variable.
SW2 DIP State (Bits 1, 2, 3, 4)
Difficulty Level
Payout Ratio (Games per Win)
OFF, ON, OFF, ON
Level 11 (Maximum Difficulty)
~1 in 1600 games
ON, OFF, OFF, ON
Level 10
~1 in 1200 games
OFF, OFF, OFF, ON
Level 9
~1 in 800 games
ON, ON, ON, OFF
Level 8
~1 in 600 games
OFF, ON, ON, OFF
Level 7
~1 in 500 games
OFF, OFF, ON, OFF
Level 5 (Standard Medium)
~1 in 300 games
OFF, ON, OFF, OFF
Level 3 (Easy)
~1 in 150 games
Data compiled from Neofuns LP.DFK01 / TY.LP001 firmware documentation.
By analyzing this data, the economic power of Neo Claw becomes evident. If an operator populates a machine with generic plush toys costing $3.00 each wholesale, sets the price to $1.00 per play, and configures SW2 to Level 5 (1 in 300), the machine generates $300 in revenue to dispense a $3 prize—yielding a staggering 1% payout ratio and a 99% gross margin. The machine actively guards this margin by keeping the PWM voltage low across 299 subsequent plays, occasionally allowing an un-gated strong grip to reward a player and maintain the optical illusion of fairness within the venue.
9. Security, Compliance, and the Legal "Skill Game" Landscape
Because Neo Spin, Neo Claw, and Brick Stacker utilize deterministic algorithms to control their economy rather than pure player reflex, they occupy a highly volatile and contentious sector of commercial law.
9.1 Hardware and Auditing Security
To prevent tampering from floor staff or malicious players, manufacturers employ stringent hardware security. The primary ROM containing the 8051 algorithms is often locked, and physical EEPROM chips are sealed with tamper-indicating holographic stickers. If an operator attempts to bypass the payout matrix by flashing custom firmware, the manufacturer immediately voids the warranty and waives all liability.
Additionally, the machines utilize environmental sensors. Claw machines feature pendulum-based tilt sensors. If a player violently shakes the cabinet to dislodge a prize, the pendulum strikes a contact ring, triggering an instant 8051 hardware interrupt. The software enters an ERR state, immediately cutting all power to the ULN2003 driver arrays (freezing the motors and dropping the claw), sounding an alarm, and terminating the credit.
Internally, the software maintains non-volatile audit logs. The SM8958 writes every coin inserted and every prize dispensed to an I2C EEPROM.Operators access these logs (e.g., Audits A10 to A22 on LAI hardware) to verify that the physical cash in the box matches the digital records, preventing employee theft and confirming that the payout algorithm is functioning within its expected 30% parameter.
9.2 The Legal Distinction: Skill vs. Chance
In traditional casino environments, electronic slot machines utilize mathematically proven Random Number Generators (RNG) and are subjected to stringent oversight by state gaming boards. By law, these machines must adhere to a minimum payout percentage (often strictly regulated around 85% to 90%). Arcade redemption machines, however, operate without this oversight, despite utilizing payout ratios as aggressively low as 1% to 30%.
To avoid classification as illegal gambling devices under various state penal codes, operators argue that these machines require a "predominant" element of human skill. This argument has led to fierce legislative battles, most notably in the Commonwealth of Pennsylvania.
In jurisdictions like Northampton County and Beaver County, the proliferation of "skill games"—most notably those operating on software engineered by Pace-O-Matic (branded as Pennsylvania Skill)—has drawn the ire of the Pennsylvania Gaming Control Board (PGCB) and the established casino lobby. The PGCB argues that because internal algorithms gate the winning conditions, these cabinets function identically to unlicensed slot machines, siphoning revenue from regulated casinos without contributing to gaming taxes.
However, in a landmark ruling, the Pennsylvania Commonwealth Court delivered a severe blow to the PGCB, ruling that the Board lacks the authority to regulate or seize these machines. The courts observed that because the player must execute a cognitive or physical task (e.g., memorizing a pattern, manipulating a gantry, or timing a digital block) to initiate the win condition, the machines qualify as games of predominant skill. The fact that the internal SM8958 software intentionally limits the frequency at which the player's physical skill is permitted to succeed does not, under current interpretations of the Pennsylvania Crimes Code (Section 5513), legally negate the skill requirement.
This judicial precedent allows companies like NEN, Neofuns, and Pace-O-Matic to operate these economic engines legally within casual dining venues and bars, completely exempt from casino taxation and the minimum payout regulations designed to protect consumers. Consequently, lawmakers continue to scramble to draft new legislation aimed at creating a bespoke regulatory and tax framework for the burgeoning "skill game" industry, while the ultimate fate of the classification remains pending before the Pennsylvania Supreme Court.
10. Conclusion
The arcade amusement economy, as embodied by Neo Spin, Neo Claw, and Brick Stacker, operates as a masterclass in obfuscated engineering. By combining robust, low-cost microcontrollers like the SyncMOS SM8958 with heavy-duty ULN2003 motor drivers, manufacturers have created platforms capable of operating indefinitely in harsh, high-traffic commercial environments.
The integration of industrial-grade communication protocols such as MDB allows for flawless, optically isolated monetary validation, ensuring every transaction is securely captured. However, the true brilliance of these systems lies entirely within their proprietary, obfuscated source code. By utilizing 8051 timer interrupts to synthesize PWM for variable claw voltage, or to enforce microsecond delays in multiplexed LED matrices, the software overrides human reflex to enforce strict, mathematically guaranteed profit margins.
While consumers interact with these machines under the psychological spell of the "near miss," believing that improved hand-eye coordination will yield success, the mechanical and algorithmic reality is entirely deterministic. The hardware only permits a win when the internal audit logs dictate that a payout is economically viable for the operator. As legal institutions grapple with the definitions of skill and chance, the technical architecture of these redemption games guarantees that, far removed from the constraints of regulated casinos, the algorithm will always retain absolute control over the prize.
Live field demoreact-ts
exportdefaultfunctionApp(){return(<divclassName="p-6"><h1>Hello from theProject.</h1><p>Swap this out with the real demo.</p></div>)}